Spawn individual agents or squads, and then commandeer any single unit with full first-person fire/movement controls.
Categories
Dynamic Spawn
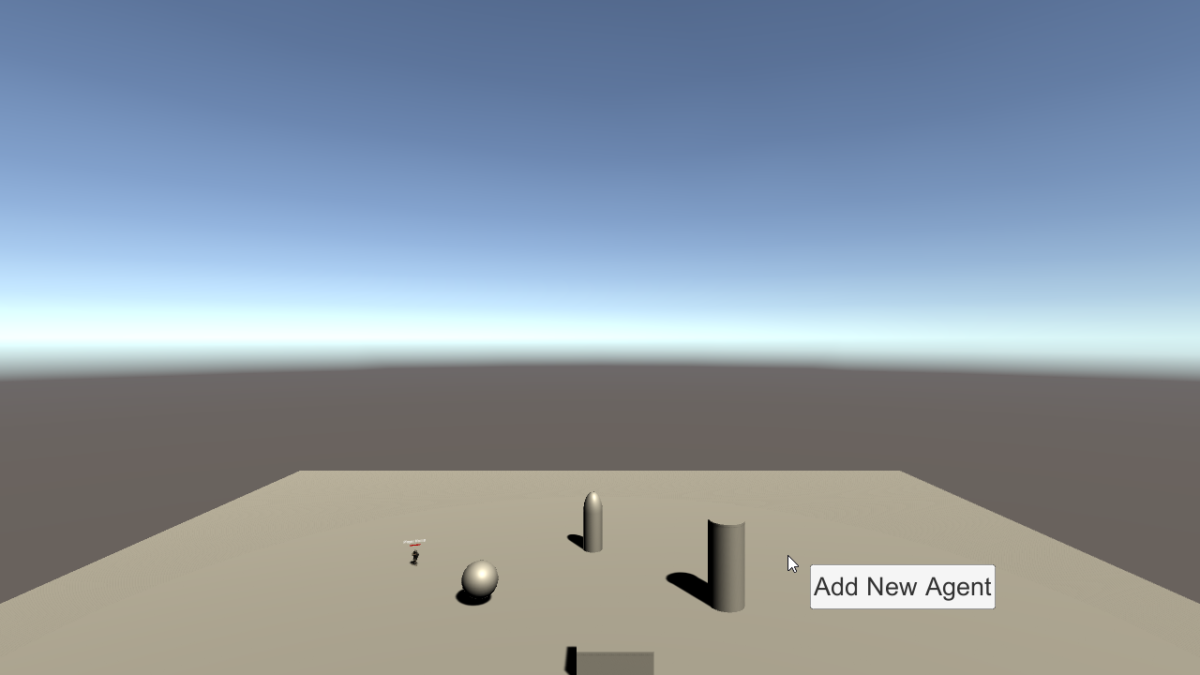
Spawn individual agents or squads, and then commandeer any single unit with full first-person fire/movement controls.
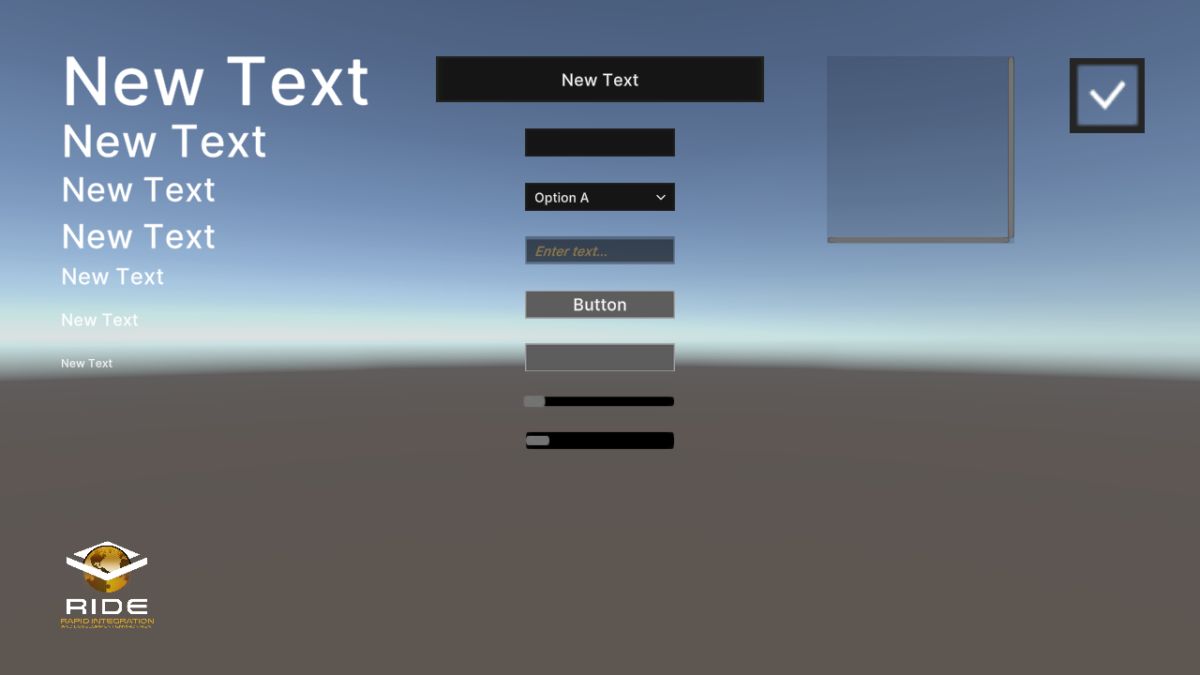
Collects the available UI elements (widgets) in RIDE.
Create a navigation mesh from local OWT data for agent pathing.
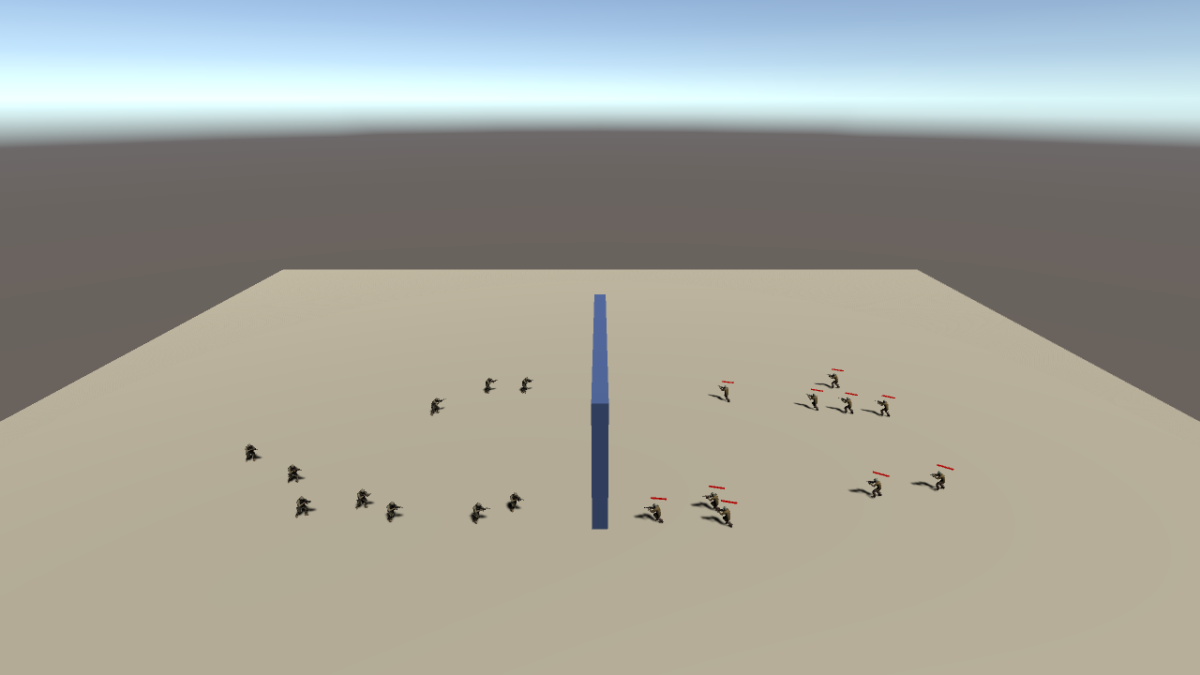
Define the unit spawn parameters of opposing Blue and Red agents. Autonomous behaviors enable each side to navigate obstacles and engage via line-of-sight in order to reach a waypoint.
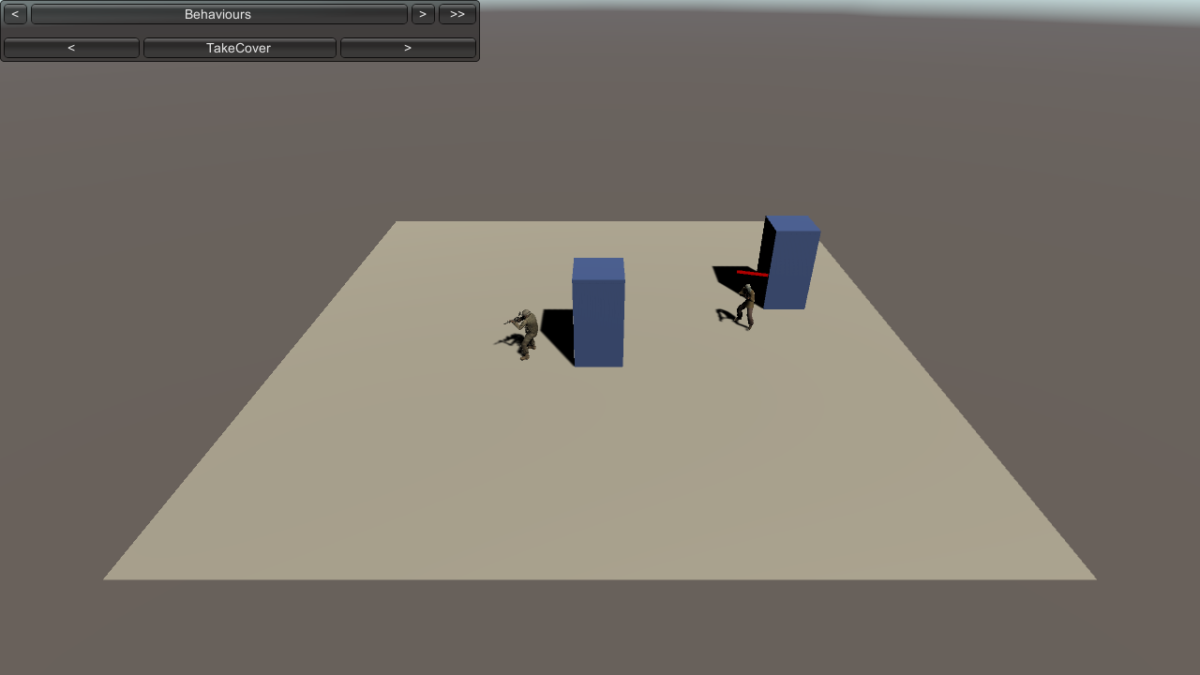
Rapid training of mlAgent units for modelling cover behaviour by inference. This scene links to an external python application over Unity TCP containing user-defined observations created in an academy for which the unit “brains” undergo training.
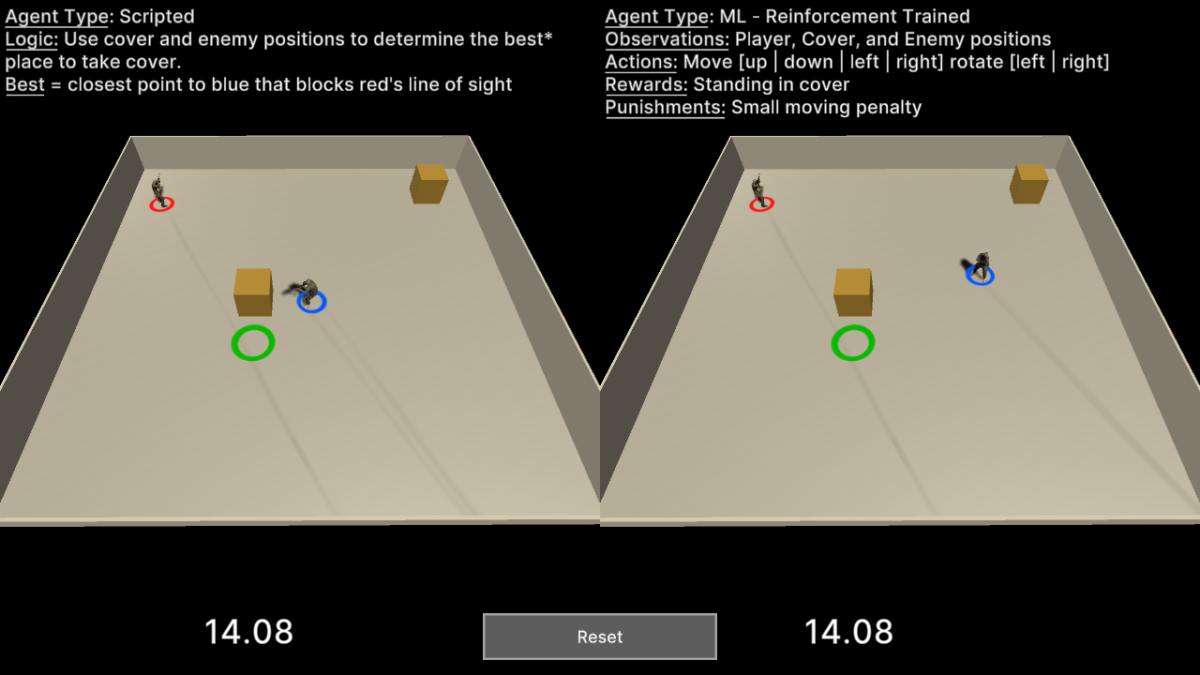
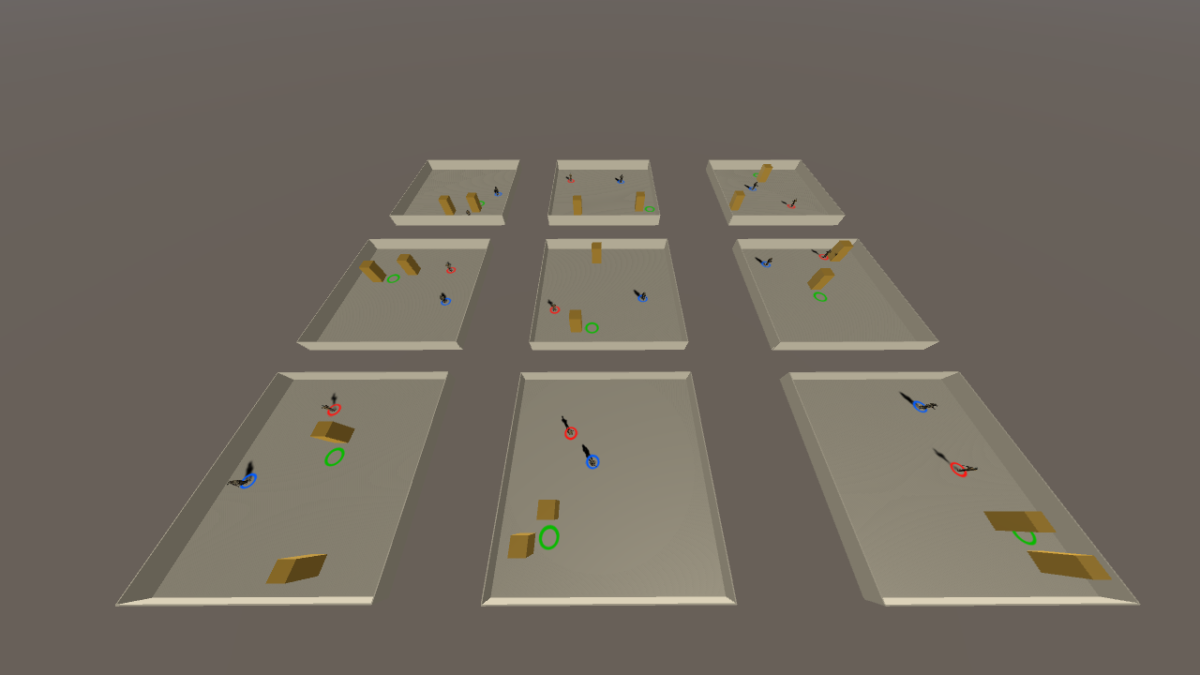
This scene demonstrates how one might analyze side-by-side the performance of two approaches for agent cover behaviour: scripted vs. Machine Learning (ML).
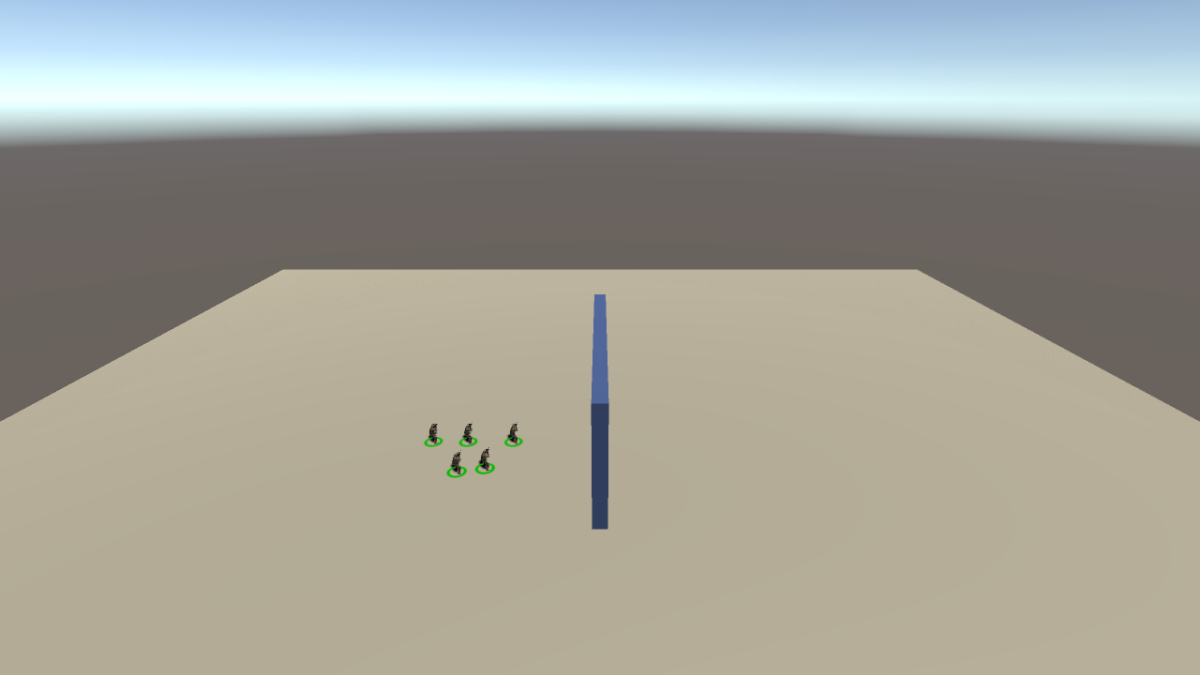
Command agents with basic real-time strategy (RTS) control type input. Displays a selector marquee in a specified color, with selected agents displaying a circular icon at their base.
Demonstrates a code-driven set of general and custom agent behaviors for a unit.
Instance Red/Blue agents through script at runtime.

Examine available terrain maps in TILE or LMAB formats, selecting between different LOD settings.