
Demonstrates how to use the “A* Pathfinding” option as a new movement system type for units.
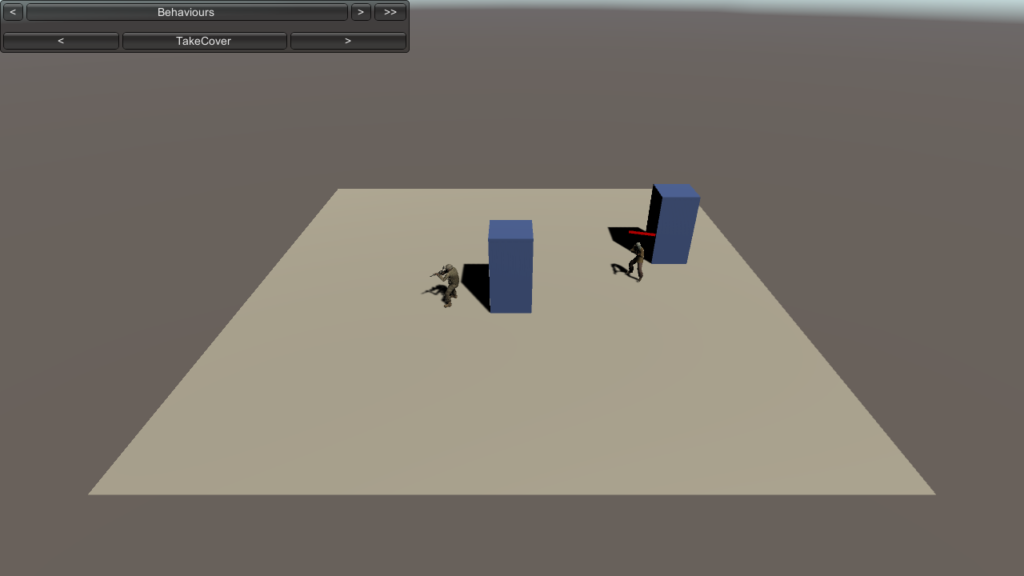
Demonstrates a code-driven set of general and custom agent behaviors for a unit.

Demonstrate various ICT S&T research lines in a well-known format with very specific pass/fail parameters and training objectives.
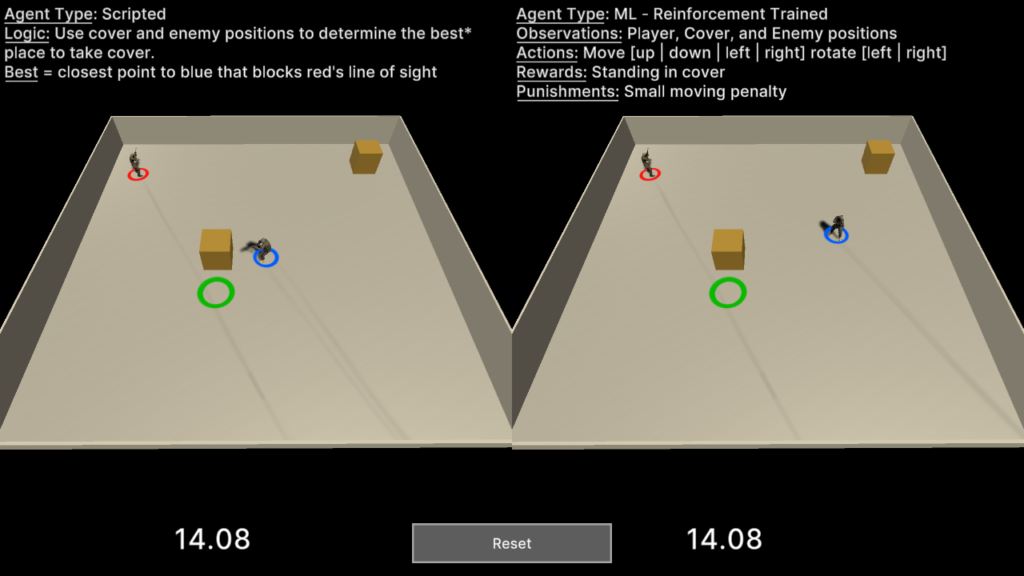
This scene demonstrates how one might analyze side-by-side the performance of two approaches for agent cover behaviour: scripted vs. Machine Learning (ML).
Interface systems for moving agents in scenarios.
Demonstrates autonomous agents using behavior trees (BT) in order to make decisions about patrolling and attacking.
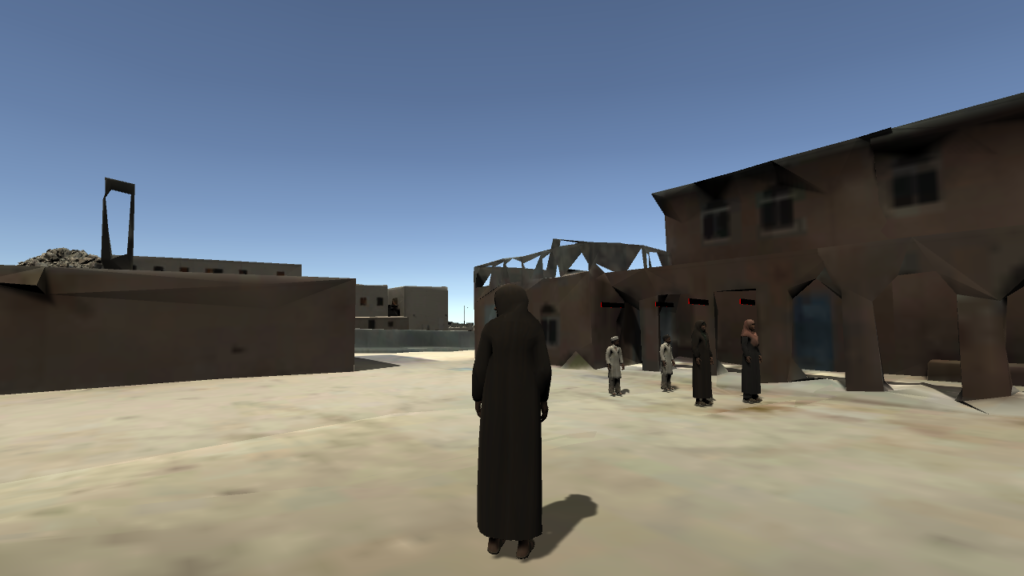
This example scene shows how to create an interactive tour around a terrain using scenario events and custom AI behaviors.
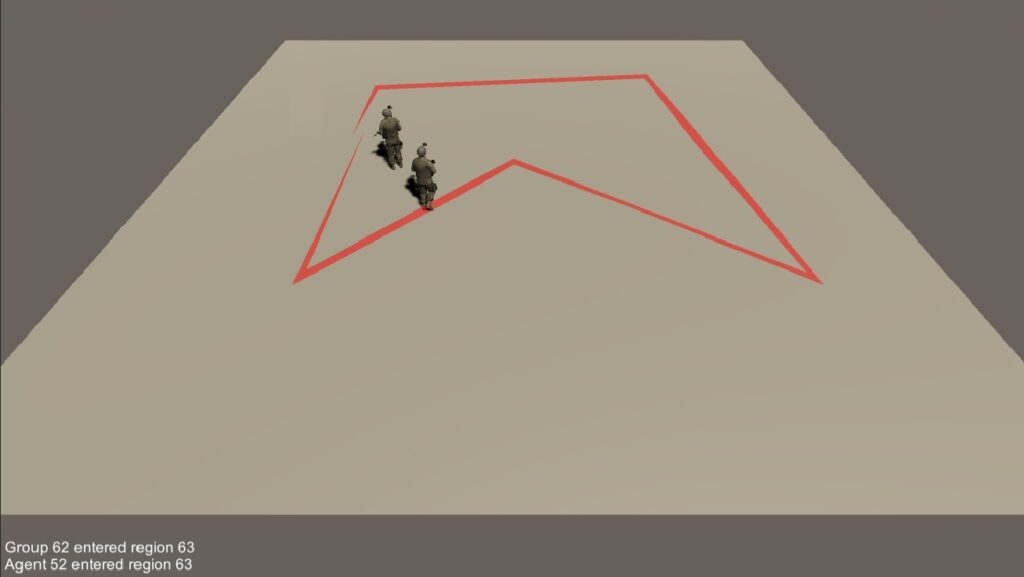
Track the movement of individual agents and groups as they move in and out of defined polygonal regions.
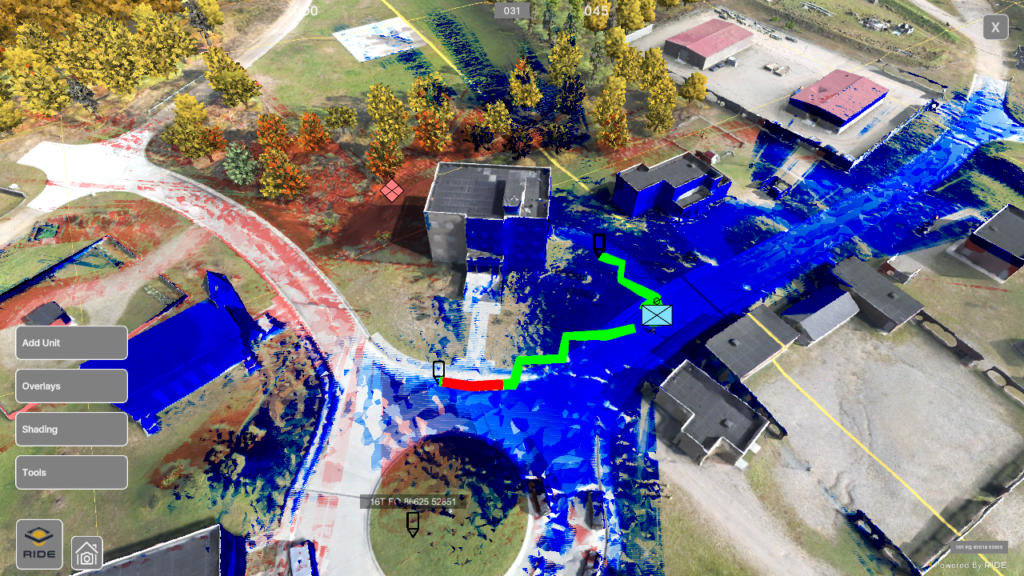
The RIDE ATLAS (Aerial Terrain Line of Sight Analysis System) integration represents an improved package of ATLAS rebuilt within RIDE.
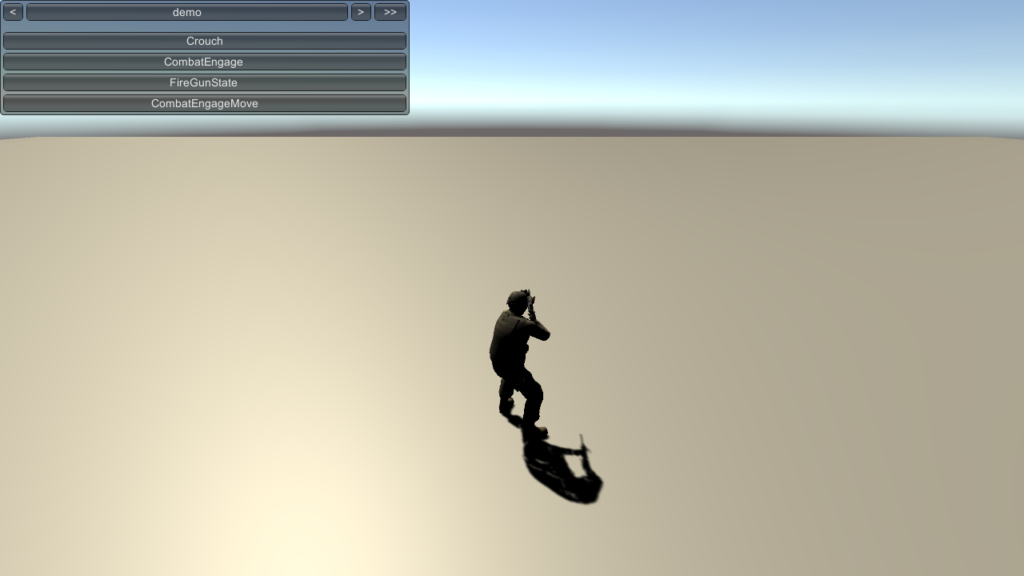
Basic Agent state machine that can be modified as needed for simulations.
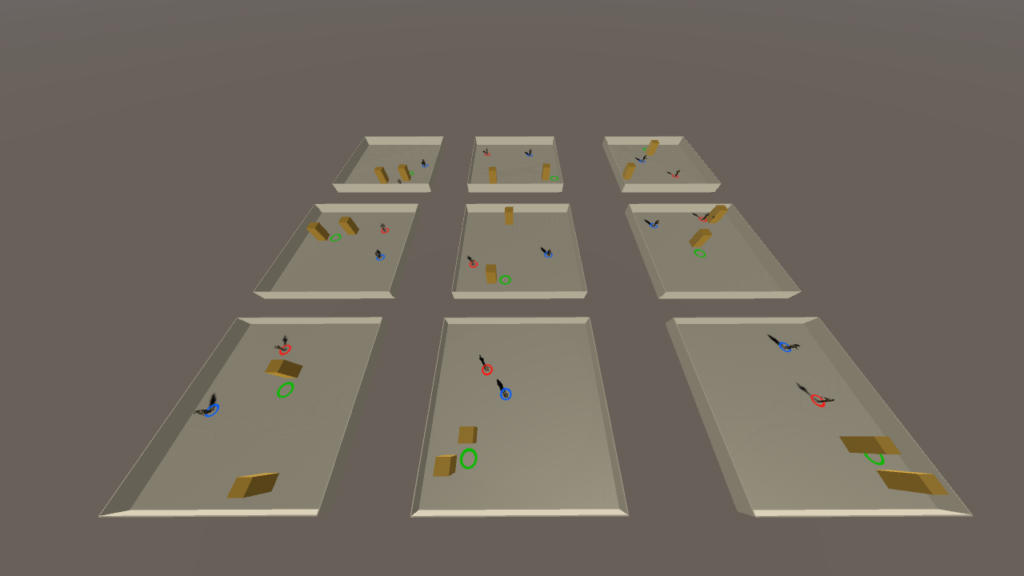
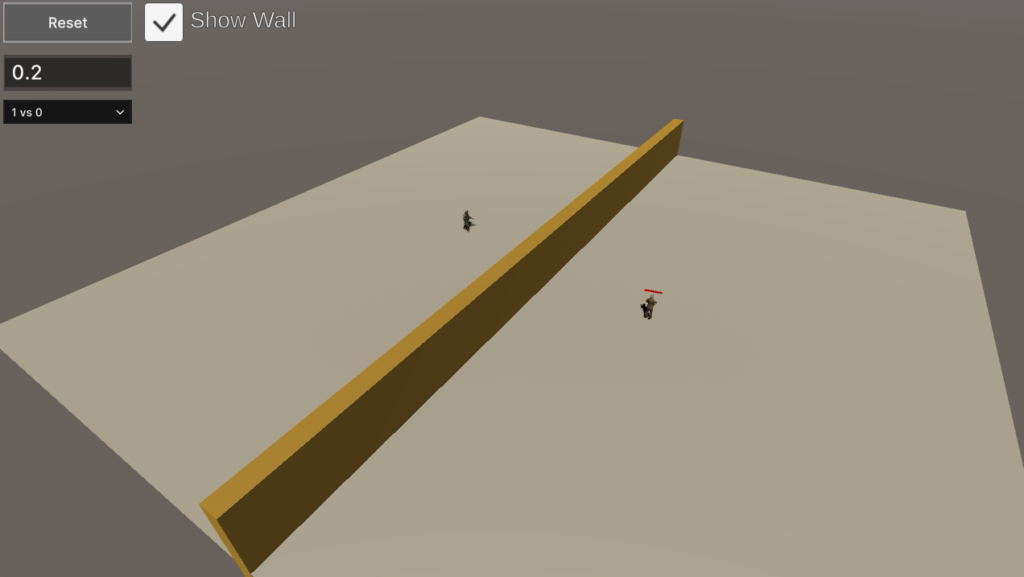
Rapid training of mlAgent units for modelling cover behaviour by inference. This scene links to an external python application over Unity TCP containing user-defined observations created in an academy for which the unit “brains” undergo training.
Navigate terrain maps with “drivable” vehicles through basic keyboard or gamepad input. Cycle multiple camera angles in and around the vehicle for observation of variables in the environment that affect physics of the vehicles. An overlay displays vehicle motion statistics in real-time.